Research
Our research goal is to improve human performance, safety, and well-being by applying human factors, data analytics, and cognitive science to the analysis, design, and evaluation of the intelligent systems. See the most updated publication list here. Research topics include:
Human Factors in Intelligent Transportation Systems
Trust and Situational Awareness in Human-Automation Teaming
Human Factors in Intelligent Transportation Systems
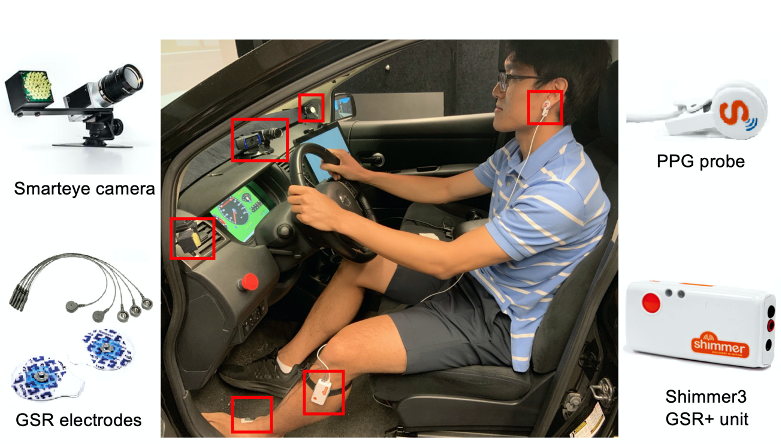
Intelligent transportation systems with connected and automated vehicles (CAVs) have the potential to provide our society with more fuel-efficient driving, reduce driving-related injuries and deaths, and reshape transportation and logistics. While CAVs are not completely ready on the road, it is necessary to study human factors in intelligent transportation systems to improve human performance, safety, and well-being. Our studies investigate drivers’ behavioral and physiological responses in various driving environments. We also design and evaluate human-machine interfaces (HMIs) to improve user experience and driving safety in intelligent transportation systems.
Human-Robot Interaction
We model human behaviors and design interaction systems for Human-Robot Interaction (HRI) in diverse settings, including manufacturing and daily life environments. Guided by human-centered design principles, we employ an iterative process to understand user needs, model human states, and design, prototype, and evaluate interaction technologies that facilitate effective communication between users and robotic systems. Our research aims to improve productivity and quality of life by making tasks such as mobility, navigation, and collaborative work more efficient and accessible. For example, we design robotic interfaces for manufacturing workers and wheelchair users.

Human Behavior Modeling
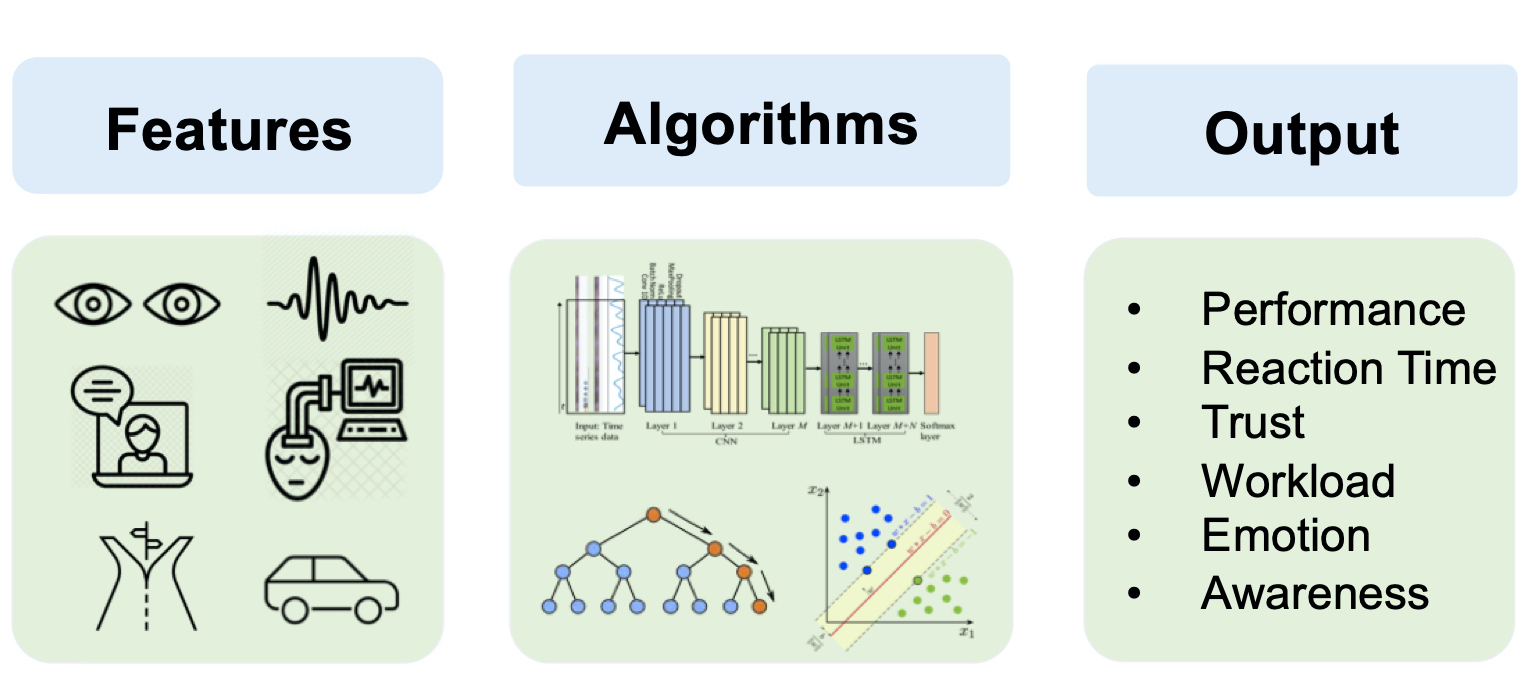
We use both data-driven methods and cognitive architecture to model dynamic human behaviors and mental states in cyber-physical systems. By leveraging models and methods from both human factors and machine learning, we develop computational models that are capable of predicting or inferring human behaviors when they interact with technologies. The inputs of models can be text, video, physiological data, etc. For example, we develop computational models to predict driver takeover performance in conditionally automated driving and situational awareness in highly automated driving. We use large-scale naturalistic driving datasets and crash databases to model real-world driver bahaviors and improve driving safety.
Trust and Situational Awareness in Human-Automation Teaming
Advances in artificial intelligence (AI) and machine learning are powering a new generation of intelligent systems. However, as these systems grow more complex, human operators often perceive them as black boxes, leading to gaps in situational awareness and inappropriate levels of trust, which hinder effective collaboration. To address these challenges, our research models user dynamics in trust and situational awareness, and designs and evaluates interfaces that enhance transparency through diverse information types, timing, and modalities. By improving system transparency, we aim to help users build appropriate trust, make informed decisions, and collaborate more effectively with intelligent systems. Application domains include automated vehicles, drones, robots, automated decision aids (e.g., military operations and medical diagnosis), and general algorithms.